This section has no direct connection with the data reduction process in THELI. However, its content must be fully understood in order to perform data reduction correctly. The THELI documentation makes use of the nomenclature and concepts presented here.
In particular in wide-field imaging, and/or observations at longer wavelengths, images will not appear flat after flat-fielding. Reasons are manifold:
Most of these effects show up as low frequency spatial variations of the background level across the field of view, with amplitudes that can become as large as 10% or more. A background model (superflat) is required to correct for these effects.
The higher atmosphere contains lot of OH– molecules which are excited during daytime and slowly decay at night. The spectrum of this airglow is characterised by clusters of numerous emission lines, starting at around 600nm and beyond.
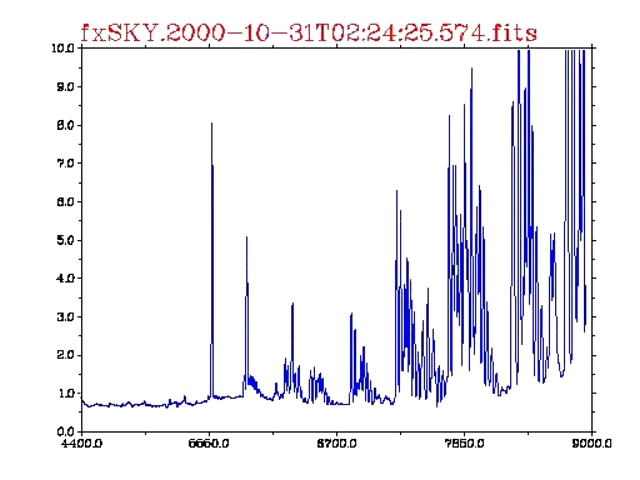
Movie of optical airglow spectra taken with UVES/VLT (credit: Ferdinando Patat, ESO)
The airglow’s intensity, temporal and spatial variability increase significantly with wavelength, dominating the near-IR sky:
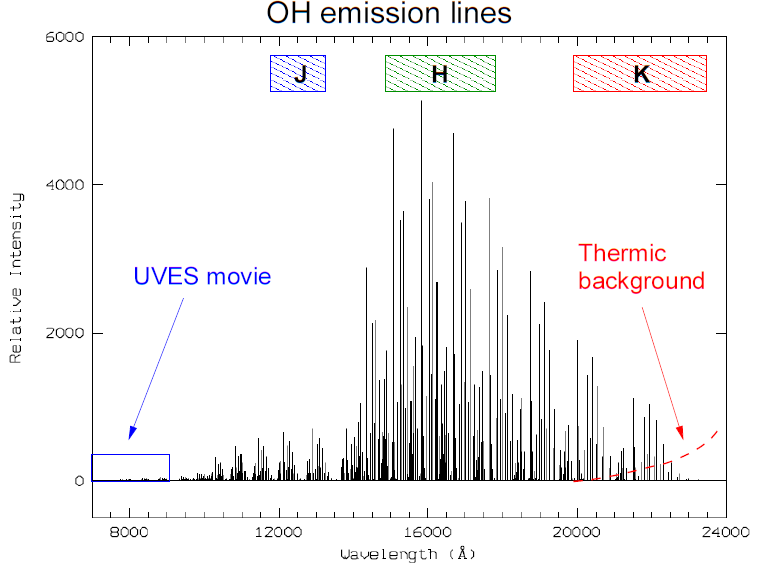
The spectral range covered by the movie of the optical airglow is indicated by the small blue box to the lower left. Notice how much brighter the near-IR sky is.
CCDs are made of silicon, which becomes transparent with increasing wavelength, starting at around 700nm. In back-illuminated, thinned CCDs airglow can cause internal reflections leading to a characteristic interference pattern in the background of an image, known as fringing. The pattern itself depends mainly on the thickness of the CCD and is thus essentially unchanged over the lifetime of the latter. However, the amplitude of the fringing pattern varies as the airglow spectrum at a given position on the sky changes with time. Fringing is also present in near-IR detectors (which are made of a different material that absorbs these photons more efficiently).
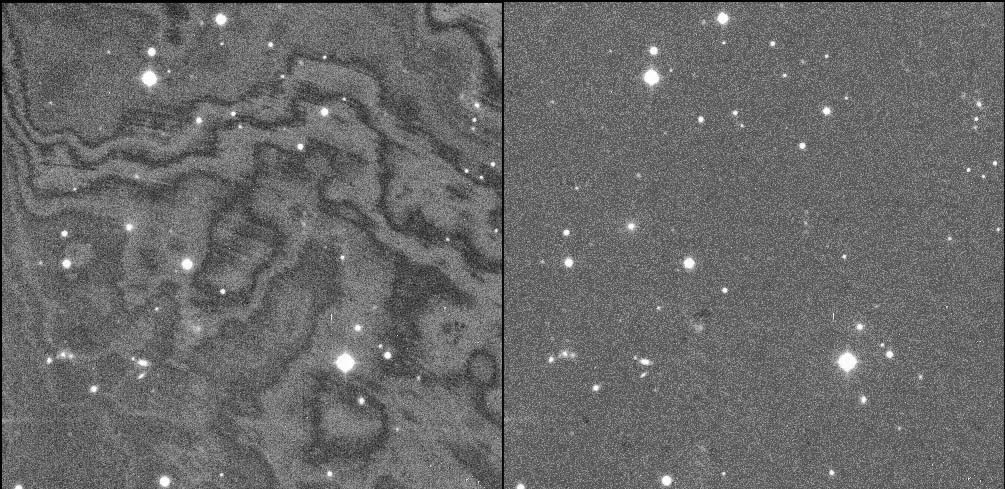
Fringing in I-band before and after correction.
In R-band this is usually not very critical and one fringe model will suffice for an entire night. In I-band things are more critical and in the worst case a new fringing model is needed every 30 minutes. In the near-IR the sky changes constantly and on angular scales of arcminutes, requiring new background models every 2-20 minutes. In the mid-IR we talk about seconds. Fringing is less important in these cases, more problematic are the sky background variations themselves:

This is a movie of the near-IR H-band airglow over 1.5 hours. The field of view is 9 degrees, 1 second in the movie corresponds to 7 minutes. The mean background level has already been removed, shown are only the variations around the mean (Credit: 2MASS wide field airglow experiment).
A superflat or sky background model can be created from a set of dithered exposures of a non-crowded (or empty) field. The dither pattern has to be significantly larger than the largest object in the field. Extended objects must be absent or otherwise the correction image will be wrong.
THELI applies several steps in order to create a superflat. First, all objects in an exposure are detected and masked, such their flux will not bias the result. The remaining images are rescaled to the same mode and are median combined (alternatively: mean combination). If all goes well, the superflat contains only background signal. This can be a pretty featureless image, or it can show significant large-scale variations and/or small-scale fringing.
The high-frequency fringing component can be extracted from the superflat by smoothing the latter with a large (several hundred pixels wide) kernel, and subtract the smoothed image from the unsmoothed superflat. In the classic approach the data is divided by the smoothed superflat, and the fringing model is subtracted (after a possible rescaling).
The classic superflatting correction (one correction image for all exposures) will only work reliably well if the background is stable during the night or at least longer stretches of time. This is known as a static superflat.
As is shown above the sky becomes more unstable with increasing wavelength. In R-band the fringing is usually low and varies slowly, thus one static superflat (for fringe correction) usually suffices for the entire night. For the I-band this is also possible if conditions were stable, or if target observations did not extend over more than 30-60 minutes in worse conditions.
In the near-IR static superflats can only be used if target observations do not exceed 5-15 minutes. Otherwise a dynamic superflat is required, i.e. the correction image is calculated from a few exposures that were taken immediately before or after the image that is to be corrected. One would like to make this window as large as possible in order to improve the S/N in the correction image, but it has to be kept as small as possible in order to still properly sample the temporal sky variations. This can require some trial- and error in data reduction. Typical window sizes are 2-4, i.e. 2-4 images before (and after) the exposure are used to create the dynamic superflat. The computational overhead for a dynamic superflat is significantly larger than for a static superflat.
Besides fringe correction there two reasons why one might want to superflat data:
These two effects are essentially different, i.e. a flat background does not automatically mean a constant zeropoint, and vice versa. If the goal is to achieve a flat background and photometry isn’t important for your work, then you are mostly fine. However, if consistent photometry matters, you are in for a good deal of trouble.
The problem is that background variations can be of additive (scattered light) and multiplicative (wrong flat field) nature, and that it is often hard to distinguish between them:
If one erroneously subtracts a background model instead of dividing by it, or vice versa, the resulting background will still be perfectly flat, but the photometric zeropoint will not be constant anymore (variations of up to 10% are not uncommon).
Interpreting the background structures sometimes helps to identify the correct approach, but it can be misleading. For example, flat field effects are often radially symmetric whereas scattered light causes one side of the image to be brighter than the other. However, sky concentration (i.e. light being reflected from the detector to the field corrector lens, and from there back again to the detector) is additive in nature and appears radially symmetric. Or scattered light can affect the flat field, leading to asymmetric background variations in the image. In the latter case one would have to correct the flat field for scattered light first, but for the observer this is usually not possible as it requires extensive testing at the telescope.
If both additive and multiplicative effects are mixed, there is only way to fully correct for it: one must compare the data with photometric reference data from the same field and in this way establish a map of the zeropoint variations, from which a (multiplicative) correction image can be calculated. This requires a comparatively high density of reference objects and a good photometric catalogue of your field in the same filter (unlikely, unless your field is covered e.g. by SDSS). Alternatively, you could observe an external standard star field with excessive dithering and calculate a correction image which you apply to your data, trusting that the effect is stable. After this multiplicative correction, residual background variations can be modelled and subtracted.